
 Explained")
An inertial measurement unit (IMU) sensor provides time-series data, used in human activity recognition (HAR) problems, tracking and navigation problems and many more.
What Is an Inertial Measurement Unit Measure?
In the artificial intelligence era, this cheap and reliable sensor can provide a lot of data. By using machine learning and deep learning, we can generate useful insights across a variety of fields.
What Is an Inertial Measurement Unit?
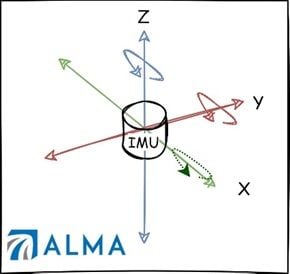
An inertial measurement unit is one of the most common sensors in the navigation field. It contains an accelerometer and gyroscope, and on occasion a magnetometer and a barometer. The accelerometer is responsible for acceleration measurements, while the gyroscope is responsible for angular velocity measurements. Each of these measurements are represented along a three-axis coordinate system. So, generally speaking, they yield a six-dimensional measurement time series stream.
Where Are IMU Sensors Used?
Actually, almost everywhere. Let’s start with our smartphones. Most smartphone devices are equipped with an IMU sensor inside called a micro-electromechanical systems (MEMS) technology. It’s also placed in many tablet devices. IMU sensors are also very common in the automotive and aerospace industries, enabling a better determination of the vehicle position and orientation.
How Does an Inertial Measurement Unit Work?
Let’s divide the discussion into four parts based on the four different sensors.
Four Inertial Measurement Unit Components
- Accelerometer
- Gyroscope
- Magnetometer
- Barometer
1. Accelerometer
This is a sensor that measures the specific force (the body mass normalizes the force). It provides the acceleration across the x, y and z axes in its local frame.
2. Gyroscope
This is a sensor that measures angular velocity around the x, y and z axes, in its local frame. Generally, it integrates the measurement results in the angles themselves.
3. Magnetometer
This is a sensor that measures the Earth’s magnetic field and provides the heading (the compass is one such device). If it is included in the IMU, we commonly describe it as a “nine-axis IMU.”
4. Barometer
This is a sensor that measures air pressure and can provide altitude.
Inertial Measurement Unit Limitations
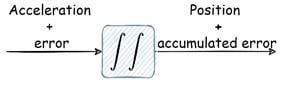
One of the major disadvantages of IMUs is their accumulated error when you integrate them into navigation equations on their own. For example, double integration of the noisy acceleration leads to an inaccurate position solution that eventually results in a huge drift. Hence, many tracking and navigation applications use additional sensors, such as global navigation satellite system (GNSS) receivers and cameras. These sensors provide position information in lower frequency and reset the accumulated errors.
Advantages of An Inertial Measurement Unit
One of the famous time-series datasets is the human activity recognition (HAR) that contains recorded IMU signals, which was released in 2014. A collection of activities were tagged and stored at 50 Hz frequency. It is widely used to evaluate state-of-the-art time-series classification algorithms.
Many algorithms were established to recognize human activity based on IMU signals only, as it can be formulated as a classification problem. The major advantage of using IMU signals for HAR over images or video is the small size of data. This allows a compact representation of the HAR classifier.
Ultimately, the IMU is one of the common sensors worldwide. It’s used almost everywhere for a wide variety of tasks.


